Voici un schéma plus complet (version 16 aiguillages).
L'objectif de cette télécommande est d'être facilement et directement utilisable sans (re)programmation par l'utilisateur.
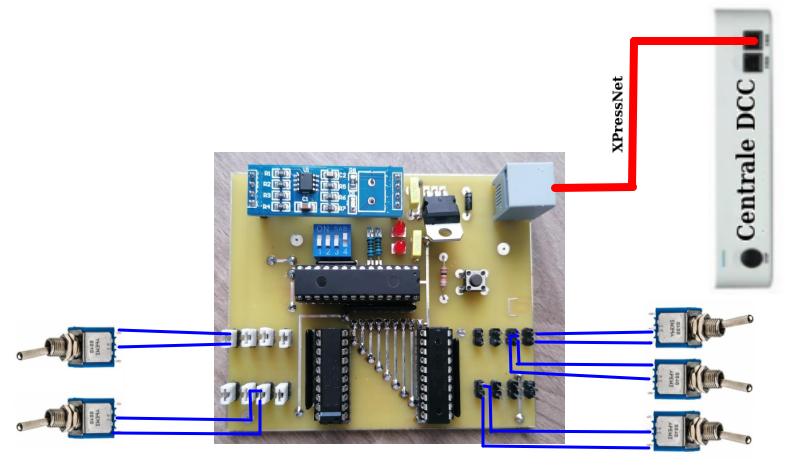
On câble les interrupteurs (TCO) destinés à la manoeuvre des aiguillages, on raccorde le montage à la centrale DCC et cela fonctionne (1 interrupteur = 1 aiguillage).
Dans la version 16 aiguillages (photo), il y a 2 configurations possibles :
-Conf 1 : 16 aiguillages "contigus" disponibles. L'adresse de la 1ère aiguille est configurée en dur.
-Conf 2 : 12 aiguillages "contigus" disponibles. L'adresse de la 1ère aiguille est configurée via des jumpers sur les 4 premiers connecteurs.
Dans la version 48 aiguillages, il y a 4 configurations possibles :
-Conf 1 : 48 aiguillages "contigus" disponibles. L'adresse de la 1ère aiguille est configurée en dur.
-Conf 2 : 44 aiguillages "contigus" disponibles. L'adresse de la 1ère aiguille est configurée via des jumpers sur les 4 premiers connecteurs.
-Conf 3 : 40 aiguillages disponibles en 2 blocs de 20 aiguillages contigus. L'adresse de la 1ère aiguille de chaque bloc est configurée via jumpers.
-Conf 4 : 36 aiguillages disponibles en 3 blocs de 12 aiguillages contigus. L'adresse de la 1ère aiguille de chaque bloc est configurée via jumpers.
La configuration souhaitée est sélectionnée via le bloc de switchs situé au milieu du circuit.
La manoeuvre des aiguillages se fait en séquence (décalé) dans le cas où plusieurs interrupteurs sont manipulés simultanément.
Le délai entre 2 manoeuvres successives est configurable (switch) pour s'adapter aux moteurs à impulsion ou à déplacement lent.
Plusieurs télécommandes de ce type peuvent être utilisées dans le cas de grands réseaux avec TCO locaux.









